PointSIFT: A SIFT-like Network Module for 3D Point Cloud Semantic Segmentation
Mingyang Jiang, Yiran Wu, Tianqi Zhao, Zelin Zhao, Cewu Lu*
(* corresponding author: lucewu@sjtu.edu.cn)Mingyang Jiang, Yiran Wu, Tianqi Zhao, Zelin Zhao, Cewu Lu*
(* corresponding author: lucewu@sjtu.edu.cn)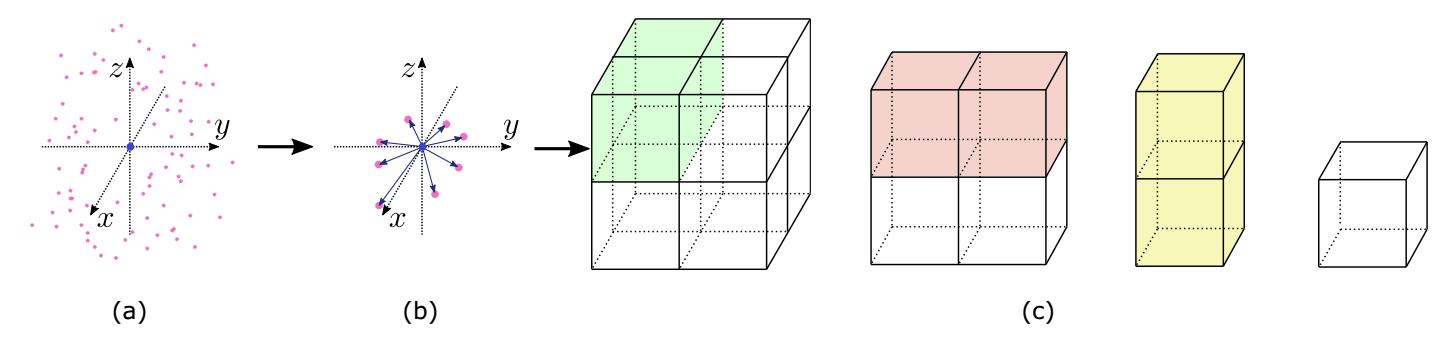 Figure 1. Illustration of the details in Orientation-encoding Point Convolutional layer. (a): point
clouds in 3D space. (b) neighbors in eight directions. (c) three stages convolution combines all the
features.
Figure 1. Illustration of the details in Orientation-encoding Point Convolutional layer. (a): point
clouds in 3D space. (b) neighbors in eight directions. (c) three stages convolution combines all the
features.
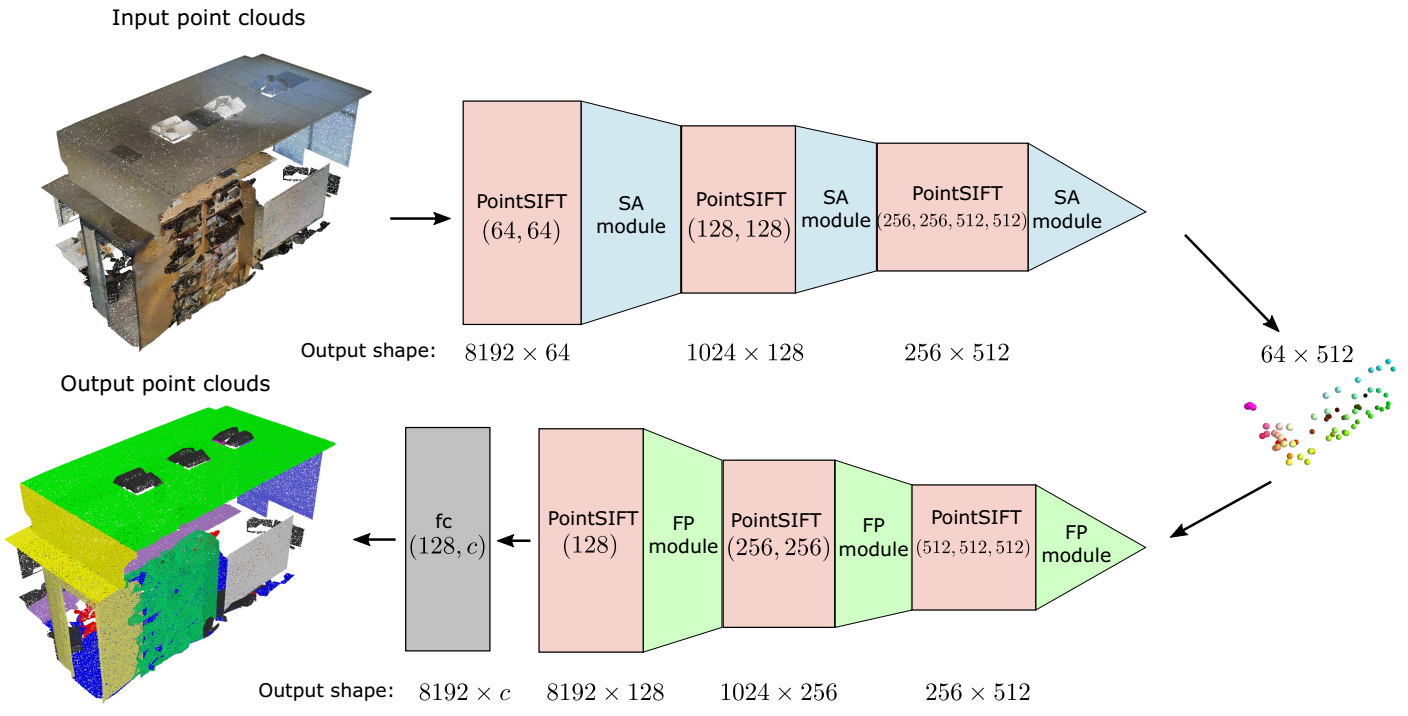 Figure 2. Illustration of end-to-end network architecture. The network contains two part: Encoder
(Set Abstraction) and Decoder (Feature Propagation). PointSIFT modules (red color) are inserted
between all adjacent layers of Set Abstraction (blue color) and Feature Propagation module (green
color). Both set Abstraction module and Feature Propagation module are introduced in PointNet paper. The
encoder and the decoder are linked by several skip connections.
Figure 2. Illustration of end-to-end network architecture. The network contains two part: Encoder
(Set Abstraction) and Decoder (Feature Propagation). PointSIFT modules (red color) are inserted
between all adjacent layers of Set Abstraction (blue color) and Feature Propagation module (green
color). Both set Abstraction module and Feature Propagation module are introduced in PointNet paper. The
encoder and the decoder are linked by several skip connections.
import tensorflow as tf # import our module from tf_utils.pointSIFT_util import pointSIFT_module # input coordinates xyz = tf.tf.placeholder(tf.float32, shape=(batch_size, num_point, 3)) # input features point_feature = tf.tf.placeholder(tf.float32, shape=(batch_size, num_point, input_dim) # setting phases is_training = tf.placeholder(dtype=tf.bool, shape=()) # setting searching radius (0.1 as an example) radius = 0.1 _, out_feature, _ = pointSIFT_module(xyz, point_feature, radius, output_dim, is_training)