URDF格式的articulation模型转fbx格式
所需软件
-
Blender (这里使用Blender 2.83版本)
-
Unity 2020.1.0f1c1(Unity用于fbx文件验证,其他版本应该也可以)
评注(Wenqiang)
我们目前对joint的标注已基本unity化,unity导入articulation时,只需要part的hierarchy,其具体的转轴可以在unity里面调,而且比较方便(thanks to ArticulationBody这个feature),所以下述步骤实际上只需要1-2-3-11-12即可,在第二步中打开urdf,根据urdf数值调整每个part的位置和朝向。
在unity中如何标注joint,请参考这篇文章。
详细步骤
-
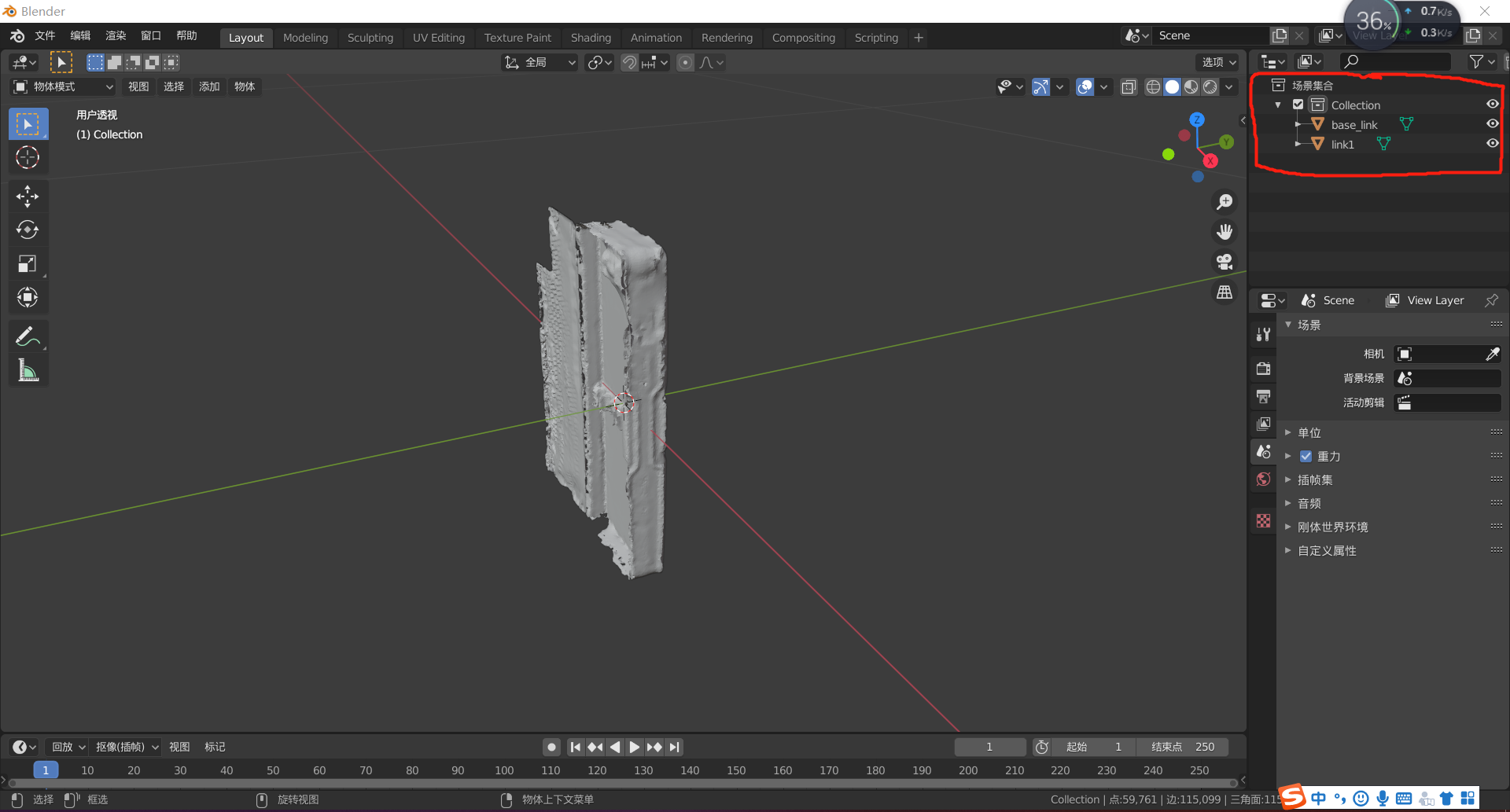
打开Blender,删除默认的cube, camera和light三个部件,导入物体obj模型,如果是articulation物体,需分别导入各个part的obj
-
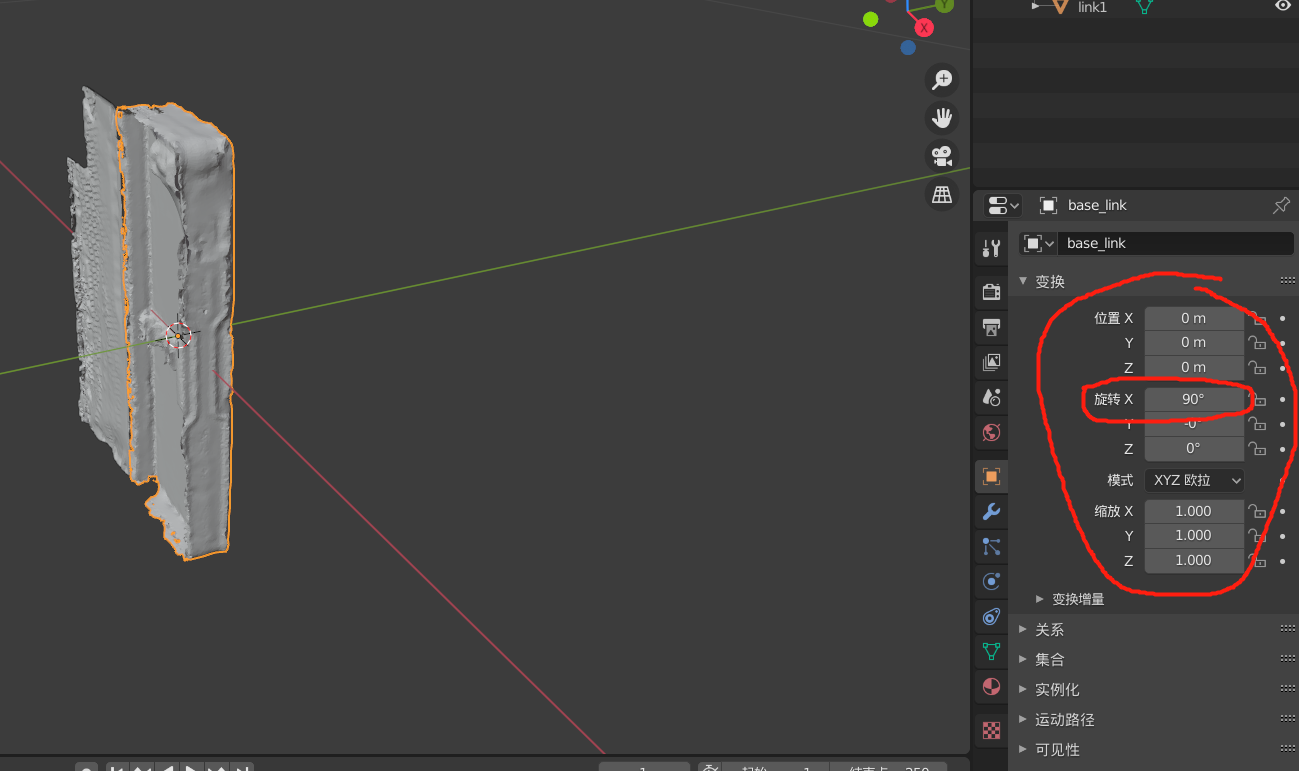
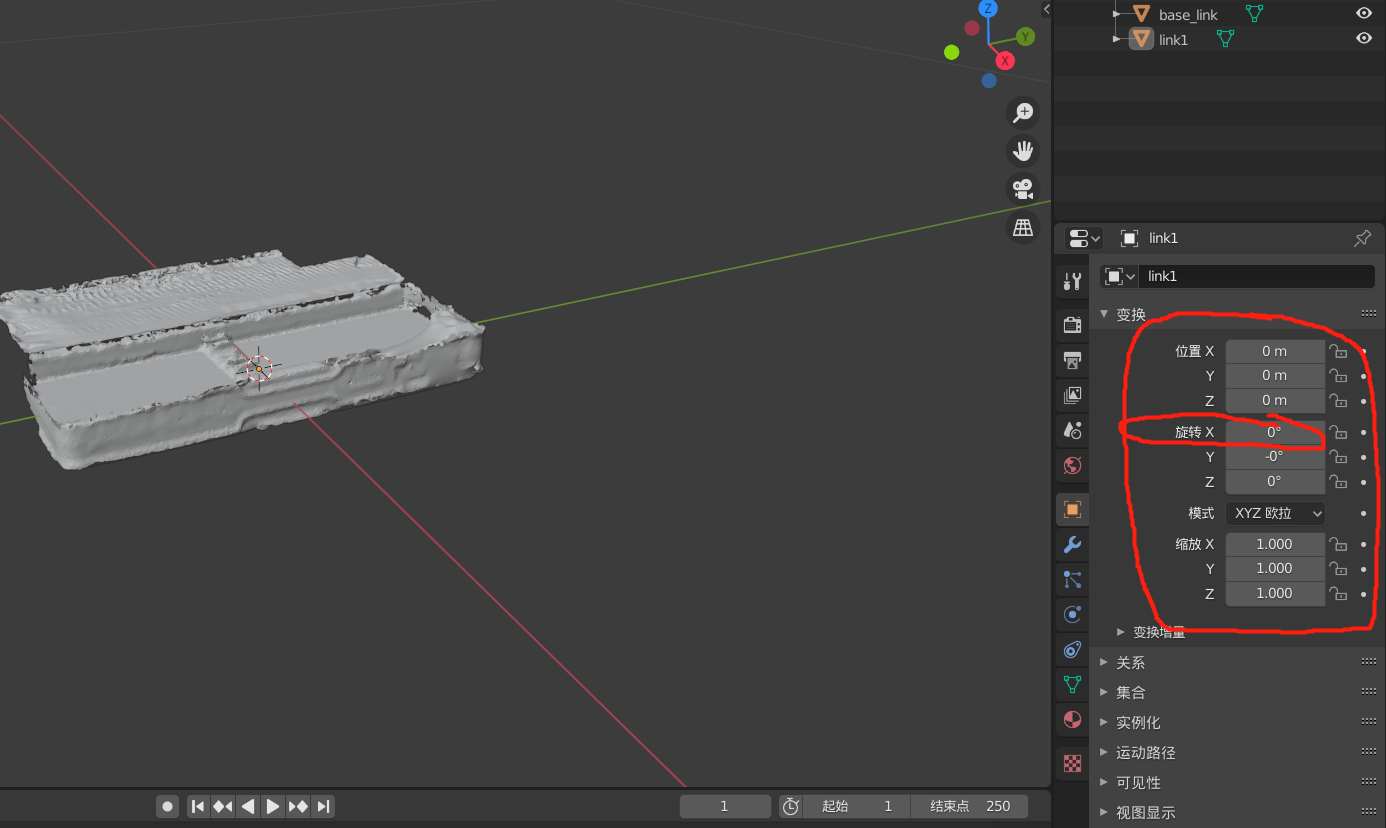
(optional)由于本教程示例的urdf由unity的ROS#插件制作而来,所以其坐标系会和blender默认有所不同,导入时初始位置会有X旋转90度的情况,需手动修正
-
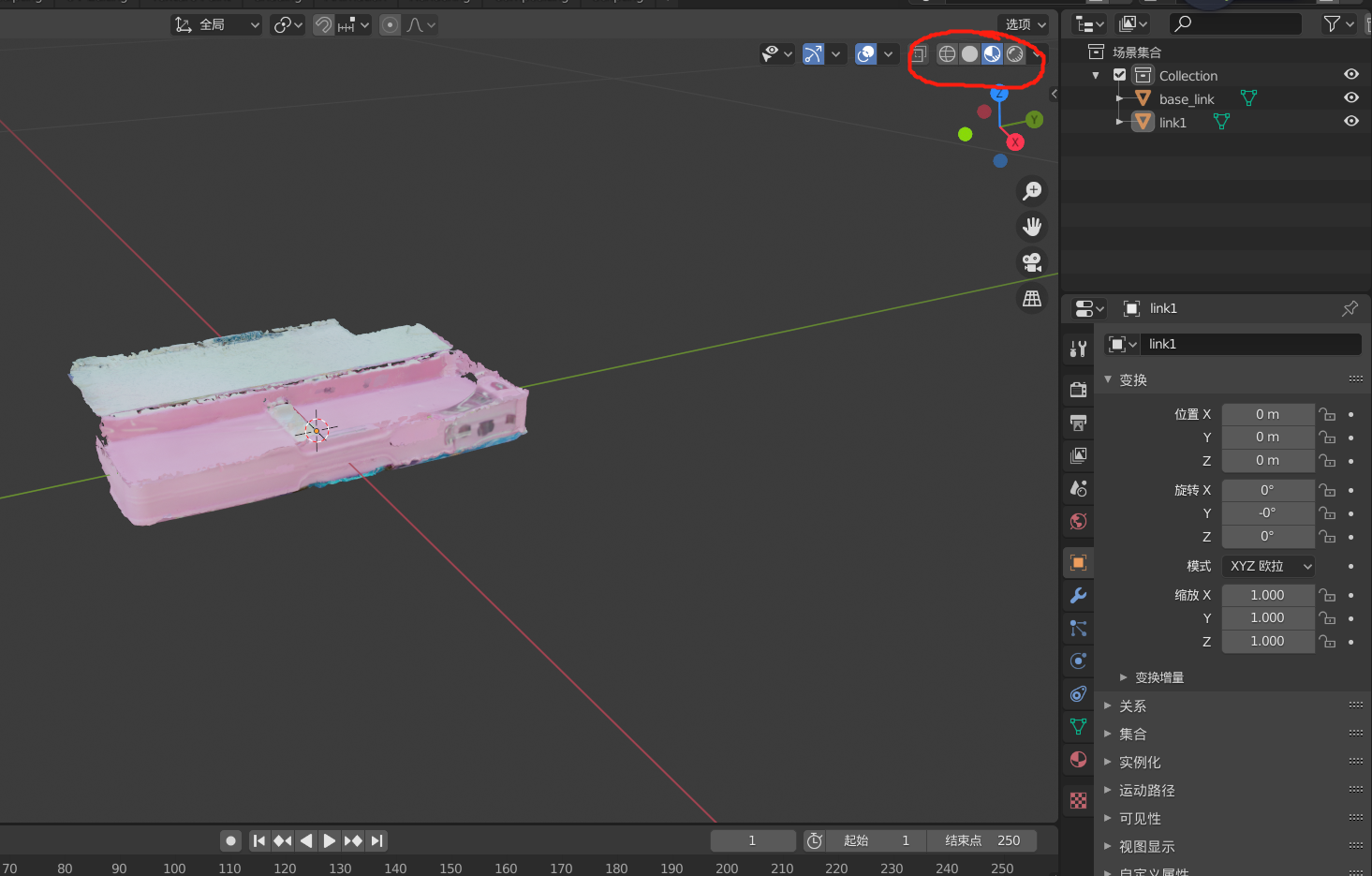
打开纹理渲染,确认物体纹理导入正确
-
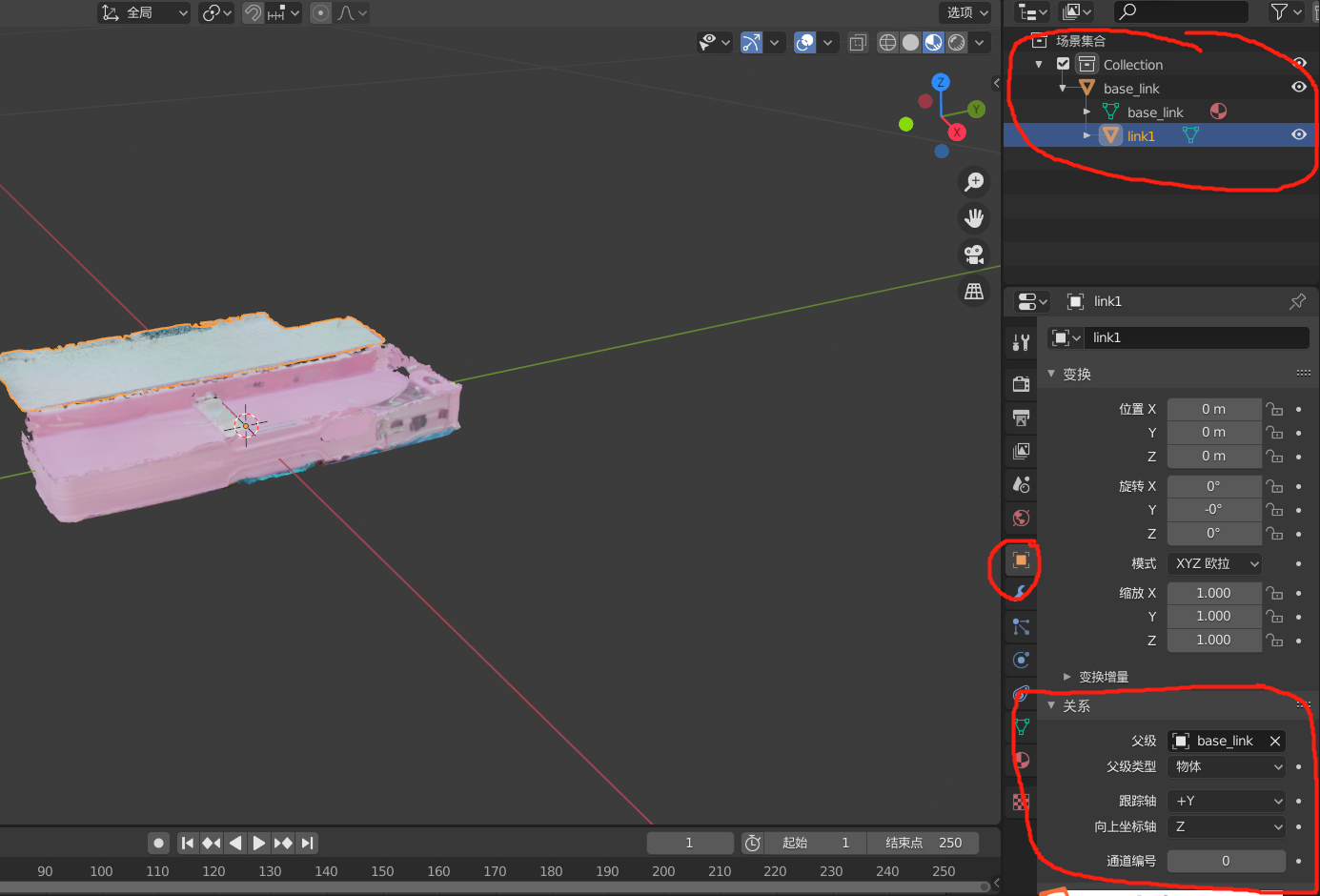
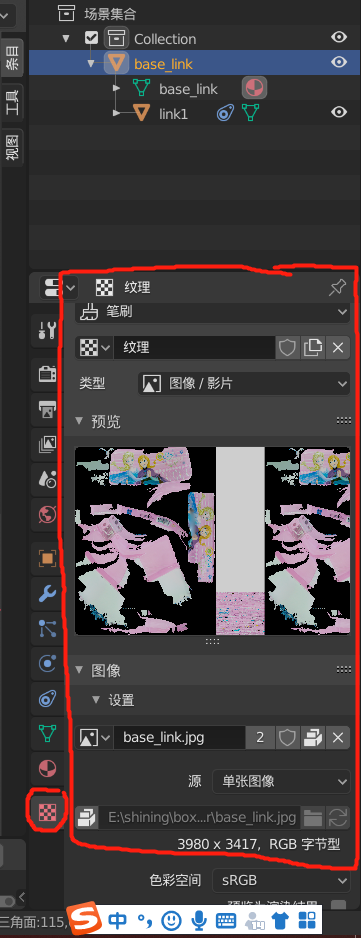
为articulation物体建立运动结构,如图所示,把base_link作为link1的父节点
-
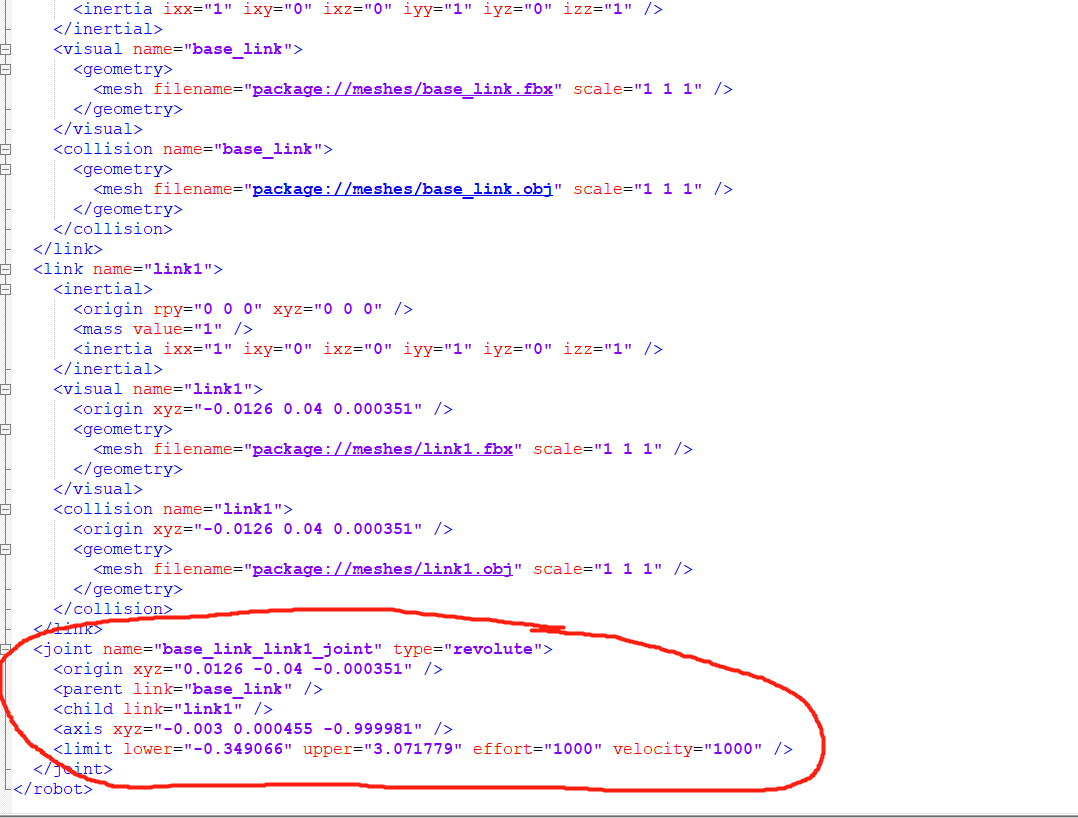
之后为可运动part建立旋转(或平移)的运动模式,首先打开urdf文件,获取link1运动的类型、旋转中心、旋转方向和旋转limit,即type, origin xyz, axis xyz, limit
-
在blender中选择左侧游标,根据旋转中心和转轴方向为游标设置位置和方向参数,这里需要注意,同上文所说,我们制作的urdf在坐标系上略有不同,所以这里三个值输入顺序需要有一个变化,具体为:旋转中心(x,y,z) -> (y,z,x) 旋转方向 (r,p,y) -> (p,y,r)(注:该变化在不同source的urdf中并不完全一致,还是以手调为准)
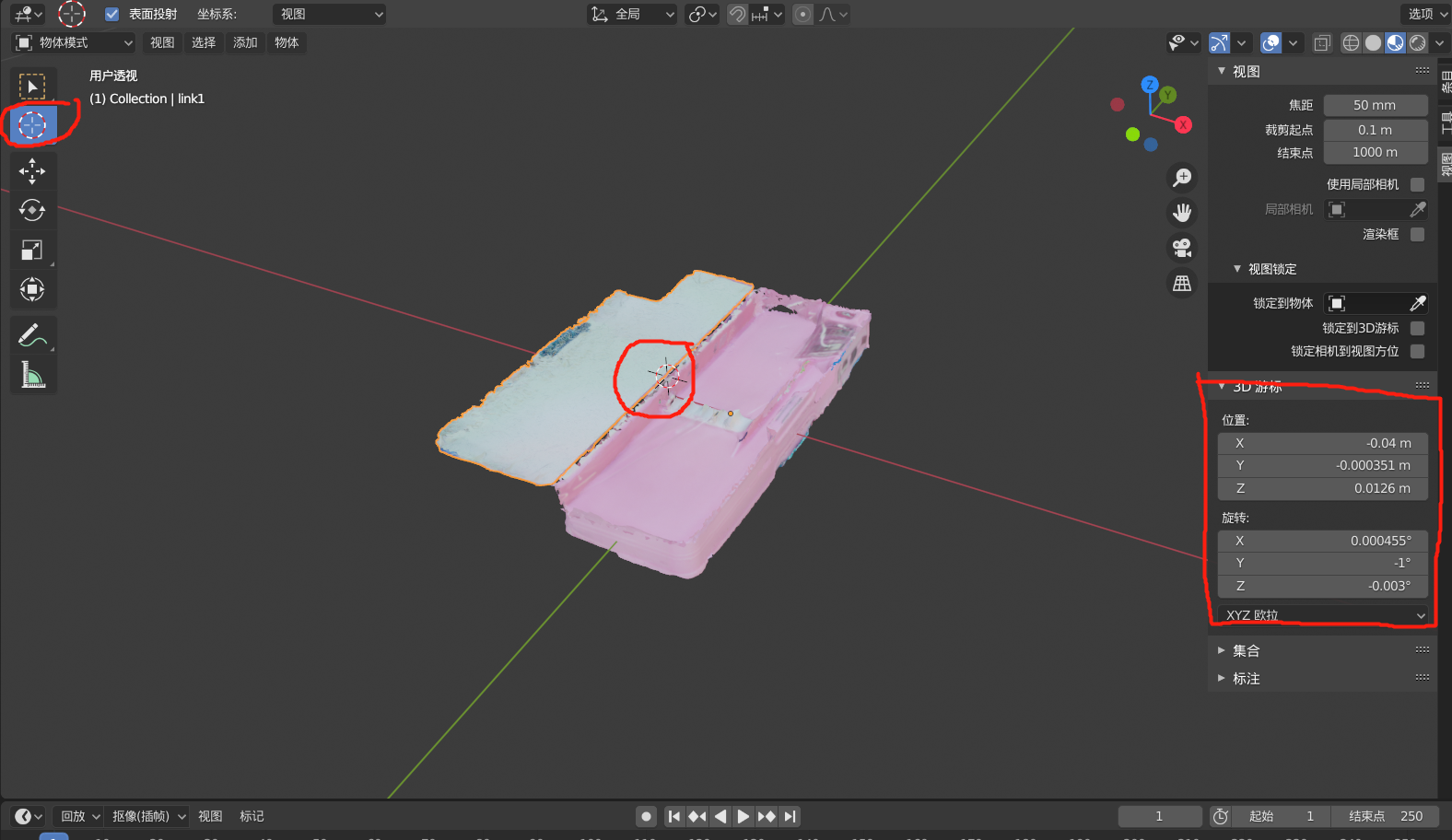
输入后可以看出,3D游标位置处于link1旋转的中心点
-
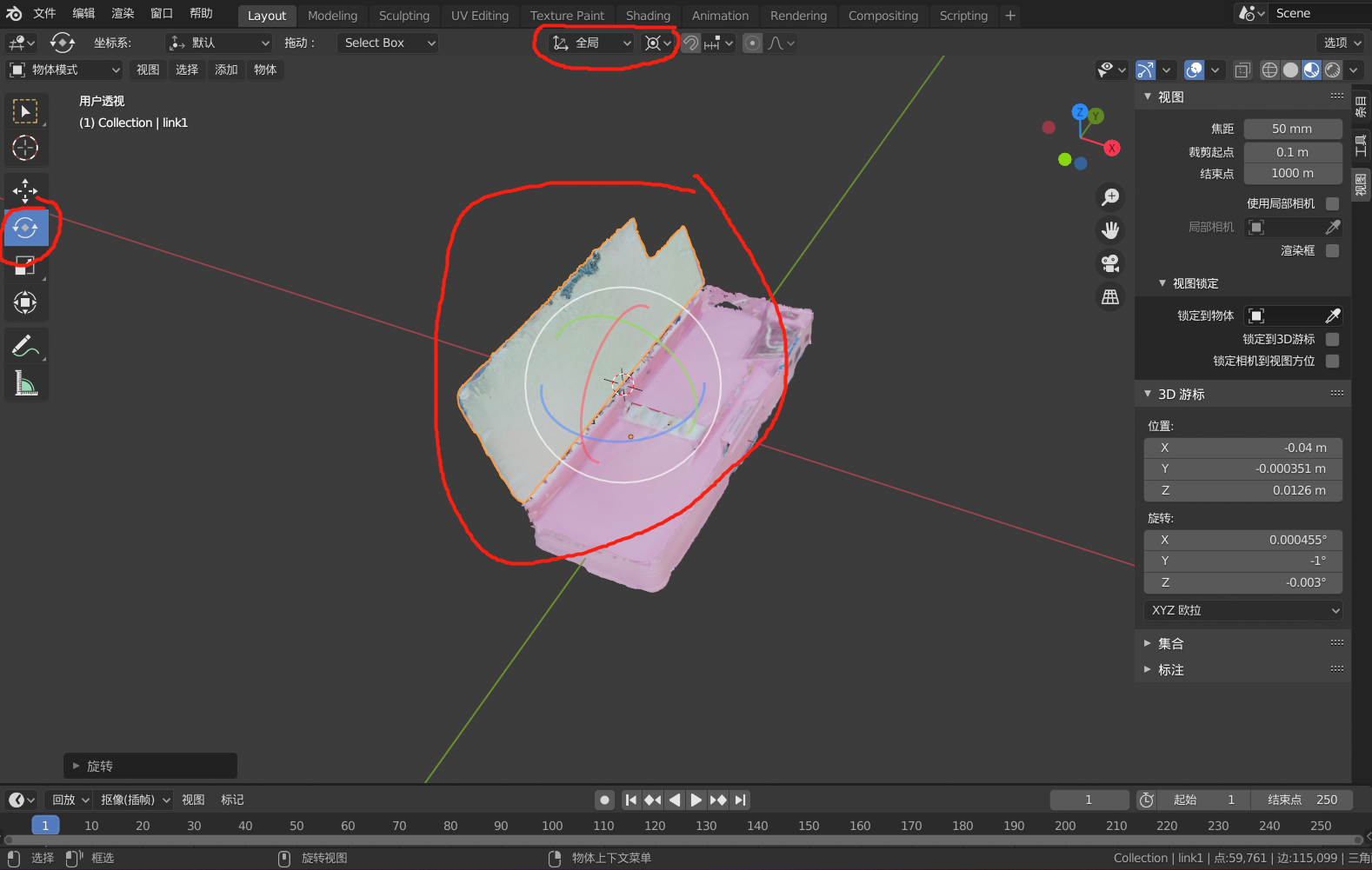
验证旋转中心及位置的正确性,选择左侧旋转,旋转位置选择3D游标,略微转动物体,可以看出link1旋转模式符合预期
-
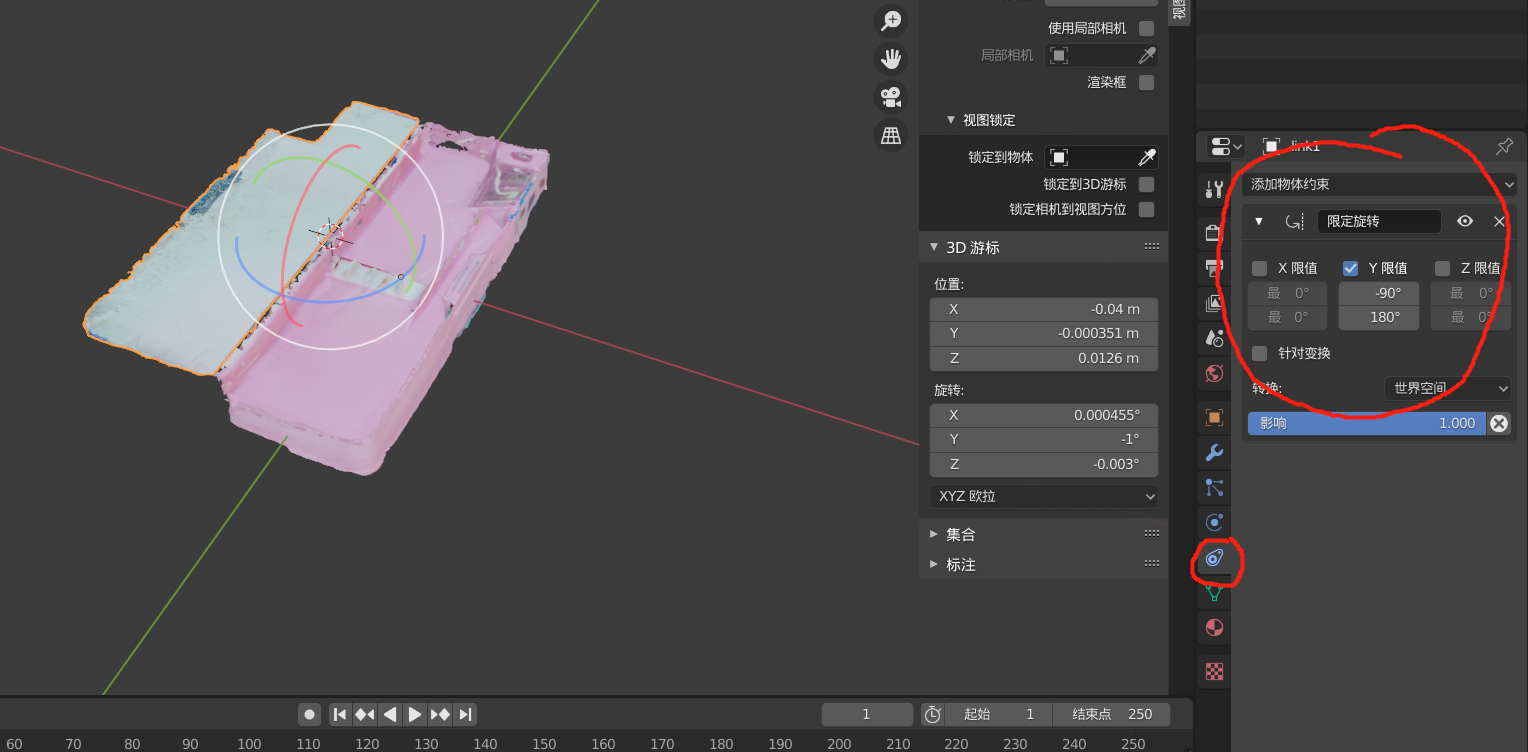
添加物体旋转约束,选择link1,在右下角菜单栏选择“物体约束属性”-“添加物体约束”-“限定旋转”,这里我们选择Y限值(刚刚旋转演示中的绿色旋转方向)为urdf中的两个limit(角度数值需要转换)
-
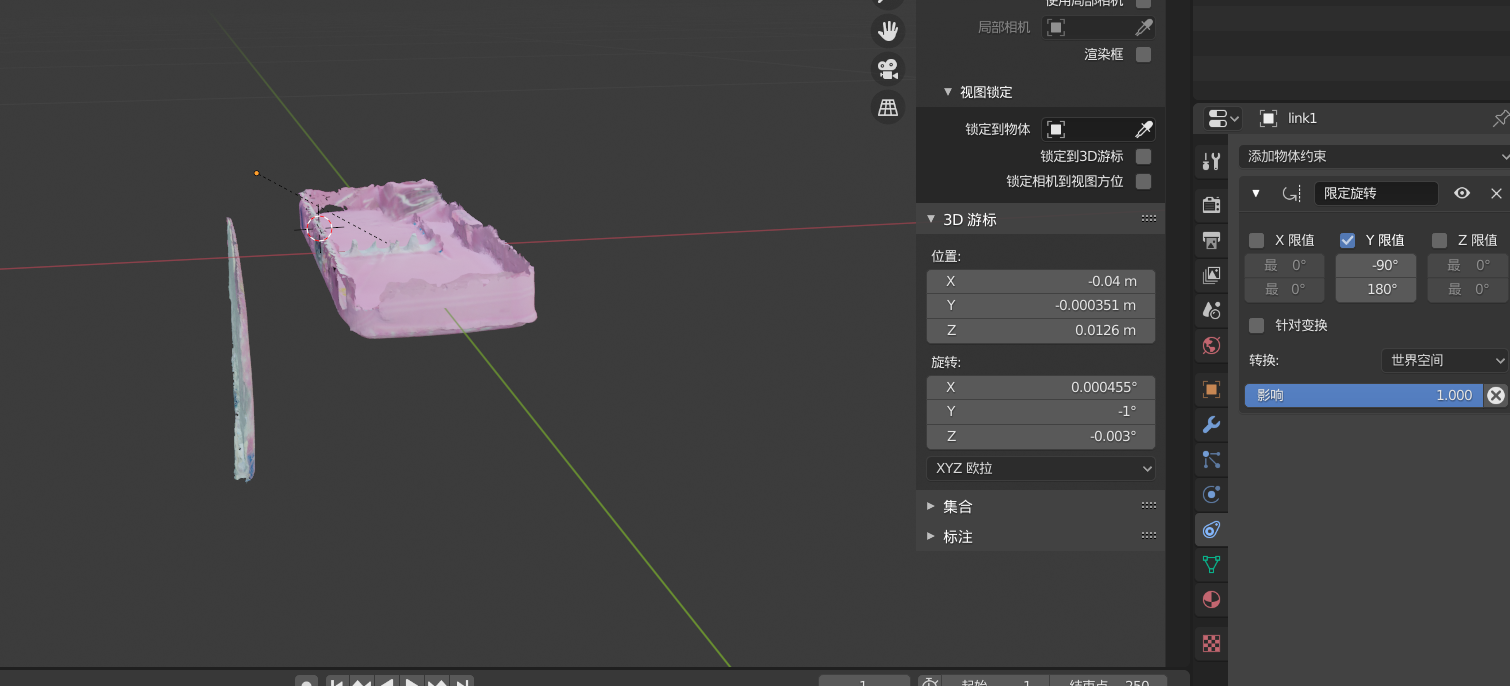
再次旋转物体,可以发现,当旋转超过限值后,将出现part脱离现象
-
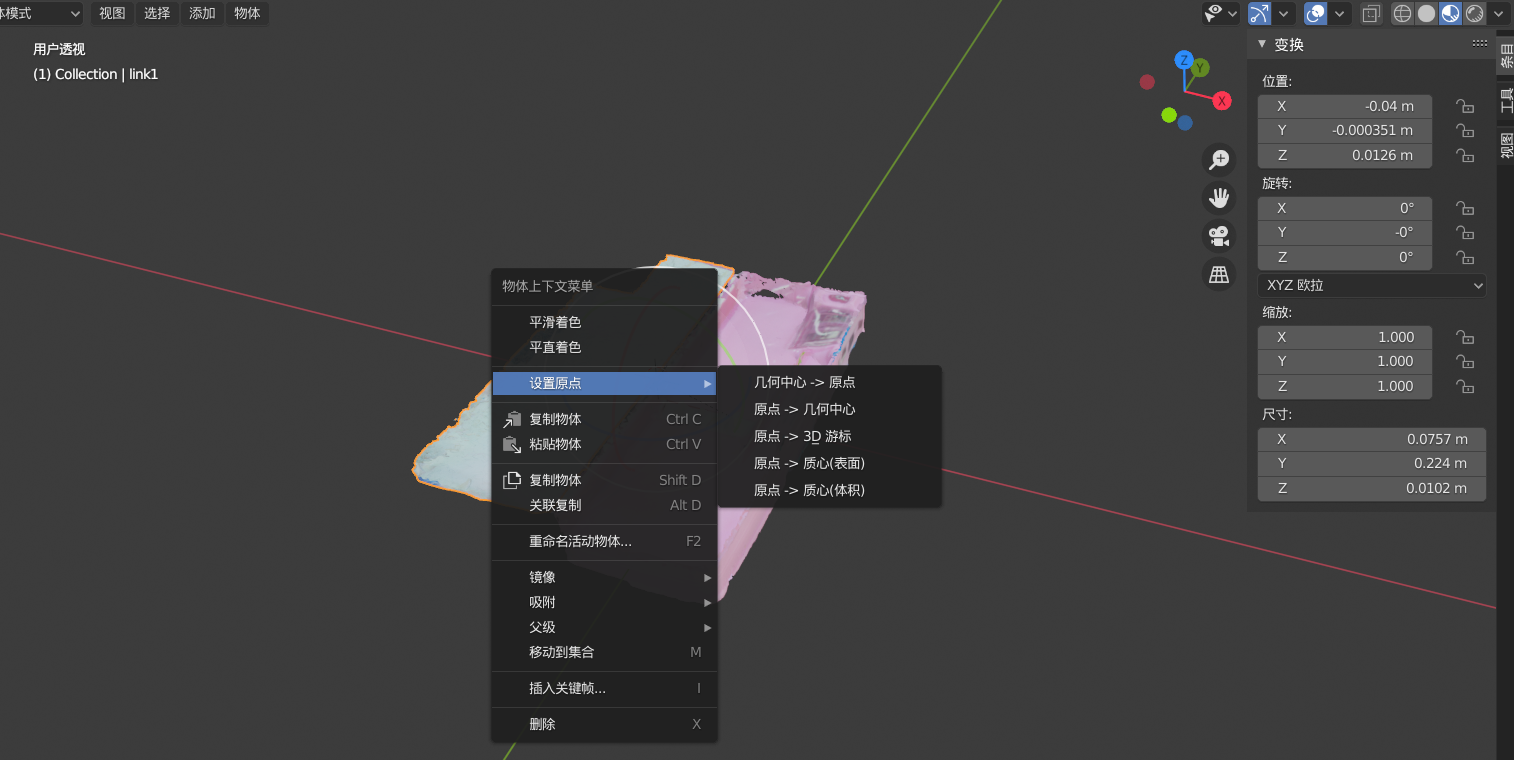
刚刚只是设置游标验证运动方式,现在要将旋转中心和方向记录在link1中。选中link1,鼠标移至游标位置右键,选择设置原点,原点->3D游标,即可将3D游标位置设置为物体旋转点,如图所示,右上角位置中已经变成了3D游标位置
-
将纹理写入模型中,在右下角选择纹理,将纹理打包按钮点亮,保证纹理被内嵌到模型里
-
导出fbx,点击文件-导出-fbx,路径模型选择“复制”,并将右侧内嵌纹理点亮,导出为box1.fbx模型文件
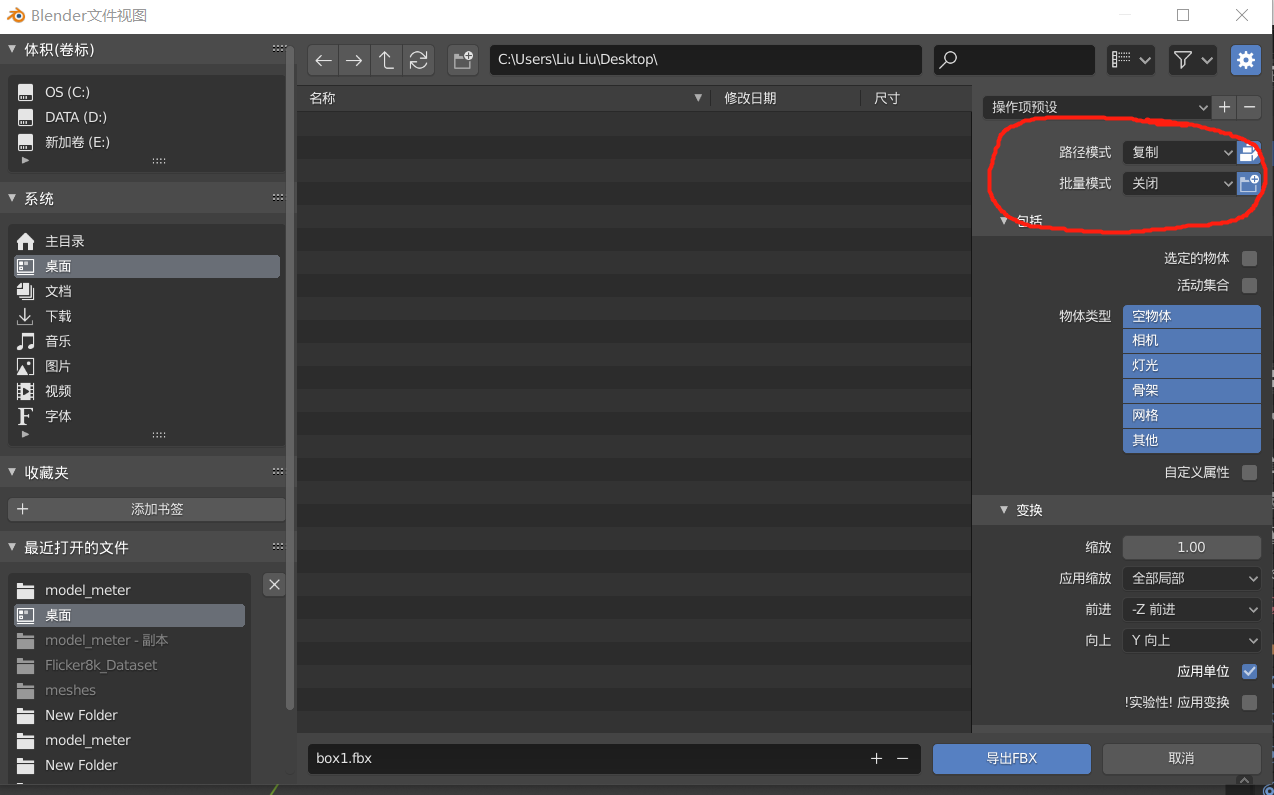
-
(optional)在Unity里验证fbx,打开unity工程,导入box1.fbx,选择旋转,可以验证link1旋转方向是否正确
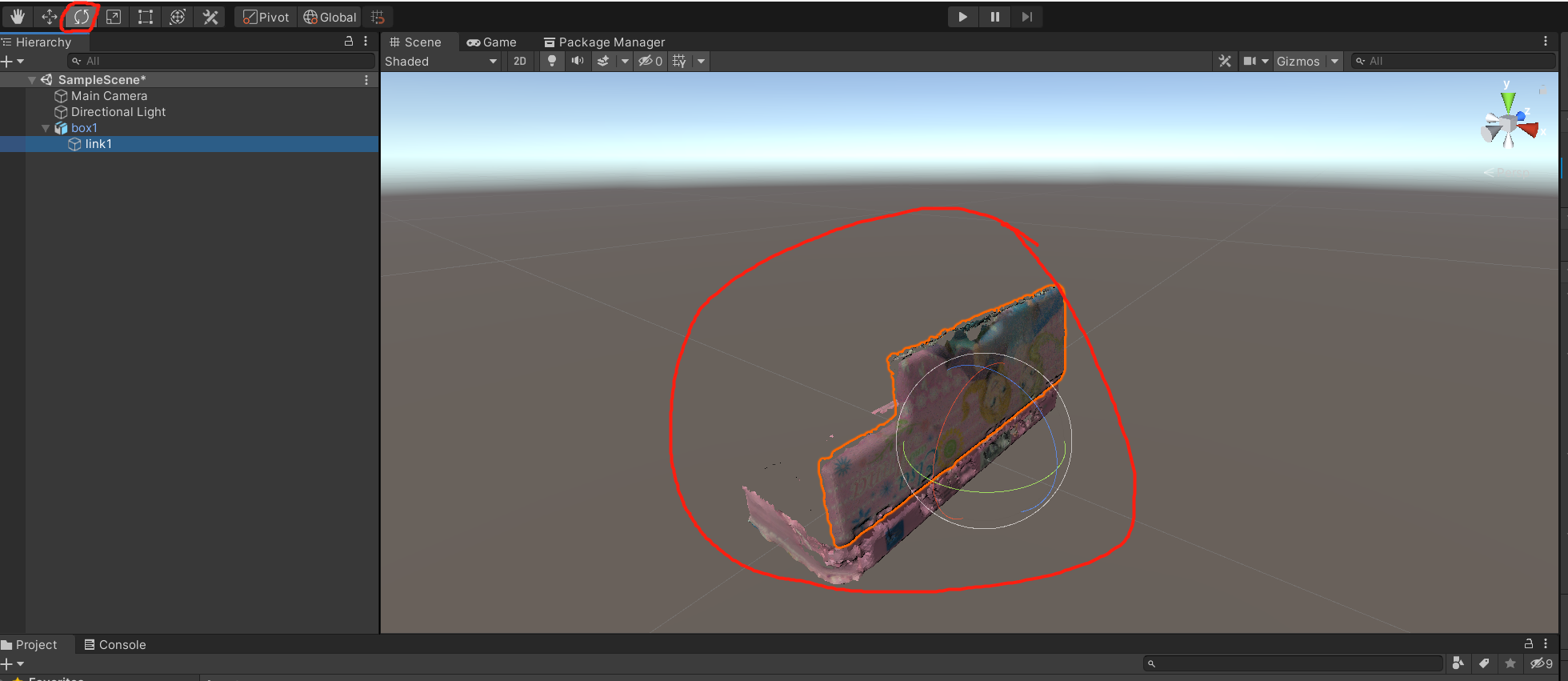
至此,urdf模型导出为fbx模型完成