GraspNet
GraspNet contribute a large-scale grasp pose detection dataset with a unified evaluation system. It contains 97,280 RGB-D image with over one billion grasp poses
AnyGrasp

AnyGrasp is a robot grasping system that is prompt, accurate, flexible, and continuous across spatial and temporal domain using a parallel gripper.
HAKE
HAKE is a large-scale Human Activity Knowledge Engine (HAKE) based on the human body part states. It has more than 7M+ part state annotations and is still under construction.
Pangea
Pangea is a structured action semantic space given verb taxonomy hierarchy and covering massive actions, bridging "isolated islands" into a "Pangea".
RFUniverse
RFUnivers is simulation environment that integrates three multiphysics coupling effects, namely air-solid interaction, fluid-solid interaction, and heat transfer.
MultiModal Sensors
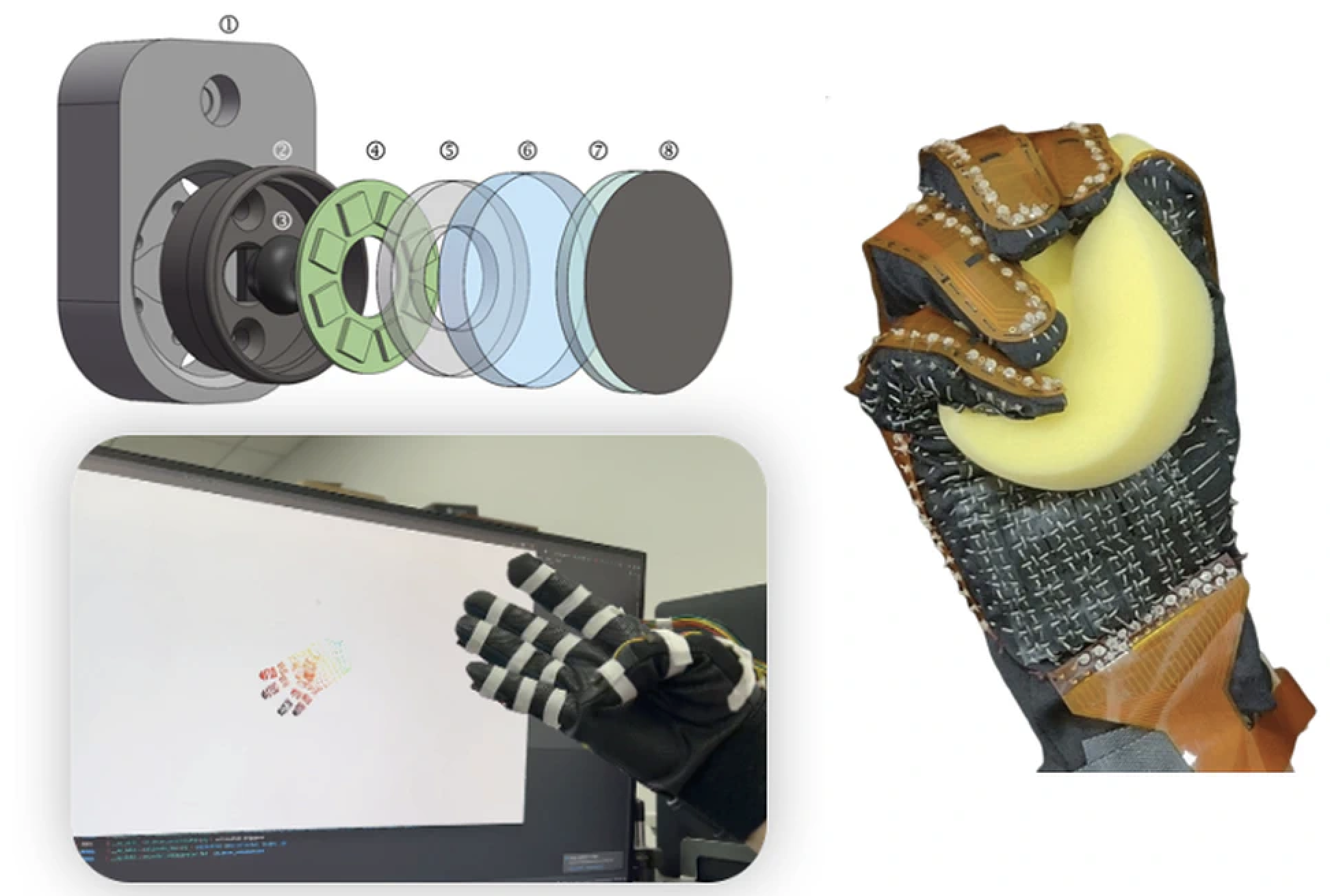
MultiModal Sensors system that consist of tactile and IMU for tracking hand's motion and contact dynamics during manipulation tasks.